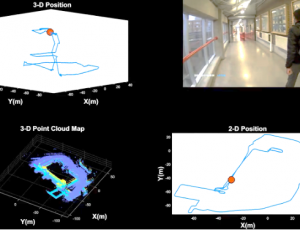
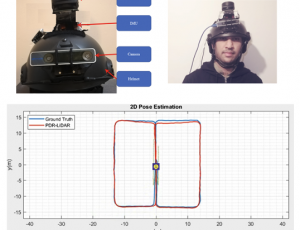
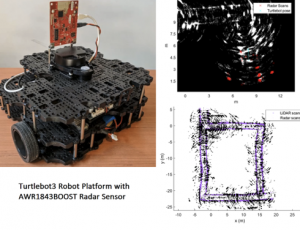
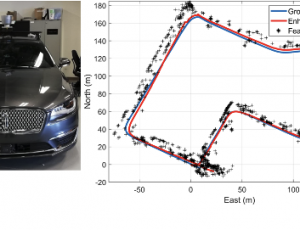
Wednesday, July 7, 2021Indoor UAV Navigation by Fusing IMU and UWB Wireless SensorsThis projects aims at enabling unmanned aerial vehicles to navigate indoors without GPS by fusing sensors data from IMU and Ultra wide band wireless... MoreWednesday, July 7, 2021Non-GPS Multi-sensor Positioning/Mapping System for First-respondersEmergency crew and first responders face significant challenges in exploring unknown areas and handling situations in complex environments that do not have GPS signals. This... MoreMonday, July 5, 2021Smart Helmet: Fusing Low-cost Single-beam Laser and IMU for Mining Workers TrackingA new LiDAR SLAM for Pedestrian (Helmet-mount) using 2D LiDAR sensor and IMU. IMU is used to perform Pedestrian Dead Reckoning to improve... MoreMonday, July 5, 2021Fusing Radar and inertial sensors for long-corridor indoor navigationLight Detection and Ranging (LiDAR) based Simultaneous Localization and Mapping (SLAM) systems are often used to map indoor areas and localize mobile systems. LiDAR scan matching... MoreMonday, July 5, 2021Autonomous Car Navigation using Visual/Inertial Sensor FusionTo enable autonomous car navigation in GPS-denied environments, this project developed a multi-state Kalman filter that fuses visual features and inertial sensors in a... MoreLoad More → Share: Twitter, Facebook Short URL: https://carleton.ca/embedded-and-multisensor-systems/?p=340