Assistive Aerial Cooperative Payload Transportation Using Quadrotor UAVs with Human Physical Interaction
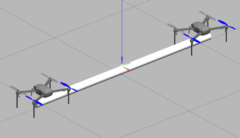
Assistive technology has become increasingly prominent in robotics, with significant applications across medical, commercial, and industrial fields. A particularly promising development is the use of assistive aerial systems for cooperative payload transportation, which could greatly improve efficiency in logistics, construction, and emergency response. This project introduces an innovative dual-UAV (quadrotor) system designed for payload transportation, guided by human physical interaction. The system aims to minimize human effort while ensuring seamless coordination between the user and the UAVs. By translating human interaction forces into smooth, controlled UAV movements, the system will enable effortless payload handling even in complex, unstructured environments. Initially, the interaction force and torque measurements will be obtained via force-torque sensors, providing intuitive guidance, while subsequently their estimations will be obtained relying on system dynamics and parameters.
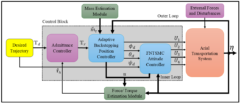
The core of this research project involves developing a robust control algorithm that integrates an admittance controller with a nonlinear controller, such as sliding mode or backstepping control. This hybrid approach will ensure precise tracking of human guidance, system stabilization, and effective disturbance compensation, accounting for unmodeled dynamics and parametric uncertainties. Stability will be rigorously analyzed using Lyapunov theory. Additionally, the project explores force and torque estimation methods that eliminate the need for direct sensor measurements, reducing hardware complexity and improving practicality. Building on prior steps, an adaptive robust controller will be developed to accommodate unknown payload parameters, further enhancing cooperative transportation and system stability.