Advanced Force Control Techniques – Precision Machining
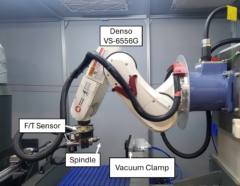
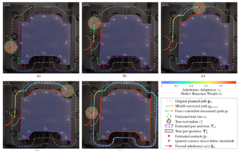
Robot-environment interaction requires delicate force control techniques, particularly when the environment is sensitive (like manipulating thin glass, polishing, or machining or deburring parts). The aerospace industries deburring precision requires tight tolerances where robots cannot meet with the positional accuracies. Force control alone won’t be functional due to machining loads and variations. We developed a modified admittance controller scheme supplemented by an algorithm predicting workpiece position estimation to achieve such accuracies. The novel controller, named the Simultaneous Registration and Mapping (SRAM), can improve machining quality and has resulted in several publications and a patent application.