Adaptive Exoskeleton Control using Deep Reinforcement Learning
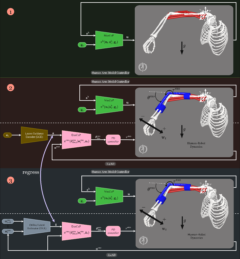
Modern workplaces like warehouses and manufacturing facilities often involve repetitive and physically demanding tasks, leading to worker fatigue and injury. Powered exoskeletons offer a promising solution to augment human strength and endurance, but they often require complex, time-consuming calibration for each individual user. Our research aims to solve this problem by creating a truly “plug-and-play” elbow exoskeleton. We use advanced artificial intelligence, specifically deep reinforcement learning, to train a control system that learns to adapt to different users and tasks automatically. By training the controller in a highly realistic computer simulation across millions of randomized scenarios, it learns a robust strategy that transfers directly to the physical hardware. The final system uses non-invasive muscle sensors (sEMG) to understand the user’s intent and provides just the right amount of assistance in real-time, making the exoskeleton intuitive, effective, and ready to use without any manual tuning.