Bio-inspired Legged Locomotion and Control 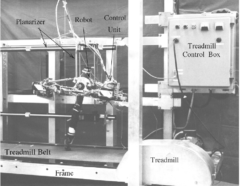
The Controlled Passive Dynamic Running (CPDR) strategy is a pioneering method for robot locomotion. It was implemented on the ARL Monopod II, and has inspired research on dynamic locomotion to this day.
Reinforcement Learning for Robust Locomotion
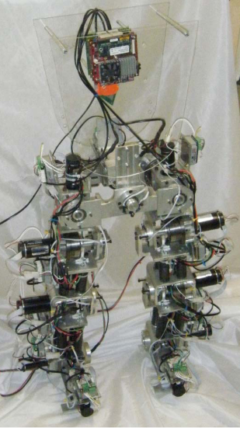
The ABL-B1 is a 13 degree-of-freedom bipedal robot designed and built at ABL. We were an early adopter of Reinforcement Learning to achieve robust walking under disturbances and obstacles. The use of RL has exponentially grown and is now standard practice in robotic/AI mobility and locomotion.