Impedance and Admittance Control
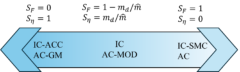
For safe and effective human-robot interaction, controllers like Impedance Control (IC) and Admittance Control (AC) are used to shape the dynamics of the robot and tune the levels of assistance or resistance applied to the user. We also study these Interaction Controllers, showing how the two complementary methods can be unified based on a trade-off in sensitivity to force sensor error and modelling uncertainty. Many Interaction Controllers lie on the IC/AC spectrum defined by this trade-off, and furthermore hybrid methods can be used to interpolate across the spectrum to improve performance. Applications range from enabling the use of lower-cost force sensors for Interaction control, and improving haptic transparency and stability.

Quick Inverse Kinematics (QuIK)
QuIK is a novel algorithm for computing inverse kinematics that outperforms conventional algorithms in terms of robustness and speed. It does so by leveraging both first- and second-order derivatives to improve convergence and behaviour near singularities. The codebase is available here.
Pseudo-Symbolic Dynamic Modelling (PSDM)
PSDM is a method for deriving closed-form dynamic equations for serial chain robots. This method provides a procedural method to derive a minimal dynamic model in regressor form, and additionally can combined with code generation for real-time implementation. MATLAB code is available here.
Optimization in Design, Planning, and Control of Robotic and Mechatronic Systems
Optimizing the design and control of complicated systems is a focus of my research as it has broader implications in both engineering and mathematics. As an example, we have shown that the Pareto-optimal sets obtained from a Discretized Multi-objective Dynamic Programming Problem with an Integral Cost and Finite Horizon does converge to the continuous problem’s solution set. This was applied to trajectory planning for the 8-axis robotic system at NRC. Another example was a collaborative project with Sander Geophysics to develop Magnetic models for UAV actuators and apply multi-objective genetic algorithms to minimize the magnetic effects on areas close to the Magnetometers mounted on a UAV wings. Results revealed two to three orders of magnitude improvement.