Intelligent Learning Assistive Devices (iLEAD) Framework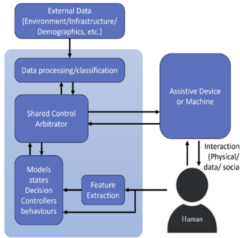
The iLEAD framework combines Classical, Deep, and Reinforcement Learning algorithms to extract human state and behaviour information to improve shared control in assistive devices. This framework is applicable wherever we need to augment human abilities to perform a task. Applications are wide, including exoskeletons, robotic arms, walking assistants, autonomous vehicles, and gaming. Below we discuss applications to upper-limb exoskeletons and gait-assistance mobile robots.
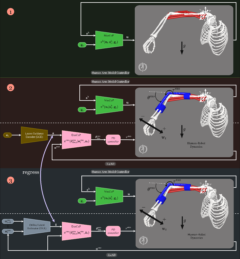
Adaptive Exoskeleton Control using Deep Reinforcement Learning
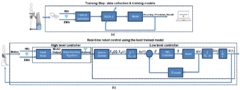
Modern workplaces like warehouses and manufacturing facilities often involve repetitive and physically demanding tasks, leading to worker fatigue and injury. Powered exoskeletons offer a promising solution to augment human strength and endurance, but they often require complex, time-consuming calibration for each individual user. Our research aims to solve this problem by creating a truly “plug-and-play” elbow exoskeleton. We use advanced artificial intelligence, specifically deep reinforcement learning, to train a control system that learns to adapt to different users and tasks automatically. By training the controller in a highly realistic computer simulation across millions of randomized scenarios, it learns a robust strategy that transfers directly to the physical hardware. The final system uses non-invasive muscle sensors (sEMG) to understand the user’s intent and provides just the right amount of assistance in real-time, making the exoskeleton intuitive, effective, and ready to use without any manual tuning.
Human Motion Intention Detection & Assistive Devices
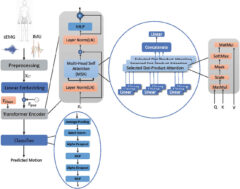
This project focuses on developing intelligent systems that can accurately detect and predict human motion intentions to control assistive robotic devices, such as exoskeletons and robotic walkers. By combining signals from muscle activity (surface electromyography, or sEMG) and body movement sensors (inertial measurement units, or IMUs), the project aims to enable robots to respond naturally and safely to a user’s intended actions. The research introduces advanced machine learning techniques, including genetic algorithms for feature selection and transformer-based models for motion prediction, to improve accuracy, reduce response time, and ensure reliable performance across different users and movement types. The ultimate goal is to create assistive devices that enhance mobility and independence for people with walking impairments.
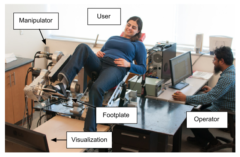
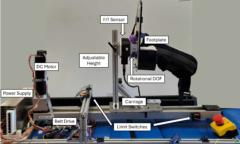
Virtual Gait Rehabilitation Robot
Stroke patients requires extensive physical therapy to regain motor function. At ABL, we design and study robotic devices for automated lower-limb rehabilitation, including the Virtual Gait Rehabilitation Robot (ViGRR) and ViGRR-LITE. These devices target acute stroke patients who may be bed-bound, a time when physiotherapy is critical for positive outcomes. Virtual environments are incorporated which display visual feedback on the motion, and also motivates the patient using simple games. Haptic feedback reflects force from the virtual environment to increase immersion and assist in the activities.