GeoSurv II
In collaboration with Sander Geophysics Limited (SGL), an Ottawa-based geophysics company, Carleton is developing an Unmanned Aerial System (UAS) for high-resolution magnetic surveys, called GeoSurv II. SGL studies have shown that a relatively small air vehicle would be highly competitive for such surveys and, consequently, the company has been providing significant in-kind support to the undergraduate project. In addition, they have supported graduate research in several critical technology areas, such as Autonomous Operation, Obstacle Detection, Low-Cost Composite Airframes, Magnetic Signature Control, Geomagnetic Data Acquisition.

Corvus
Started in 2009, the Corvus UAS is a relatively new project to develop an open-source, multi-mission system intended for use by both universities and small enterprises. Its objective is to be a modular, portable and low cost UAS standard from which multiple vehicles can be developed. The air vehicles will all be limited to 35 kg, while still being capable of carrying a wide variety of payloads in order to accomplish a range of missions. The system will also allow for a single operator to control multiple vehicles.
The video below shows a 10 minutes summary of the GeoSurv II and Corvus aircraft development.
Rotorcraft Unmanned Aerial System (RAUS)
In September 2012, a new 4th year capstone project started at Carleton University with the aim to design and build a medium sized UAV Rotorcraft. Each year, 23-25 undergraduate students will participate in this project. They are broken down into 5-6 technical groups, such as aerodynamics, fuselage design, control, etc., each led by a lead engineeer (a professor or an industry expert), just like in a real-life engineering team.
In the first year of the project, the conceptual design of the rotorcraft is completed and a 2 meter diameter, 4-bladed rotor with a fully articulated hub is designed and manufactured for whirl tower testing. This undergradute project triggered a number of graduate research projects, including one on blade aerodynamic design and another on the development of a novel magnetic lead-lag damper.
The undergraduate project is sponsored by Bell Helicopter Textron Canada of Montreal-Mirabel, Quebec. Below is the concept of Carleton University’s RUAS, after completing the first year of the project.

The fully articulated hub of the RUAS was designed at Carleton University and is to be manufactured and centrifugally tested in the Carleton Whirl Tower Facility in the second year of the project.
Quadcopters
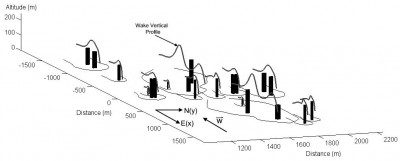
Professor Jason Etele is involved in conducting research for quadcopter UAV’s and their interference with high-rise building wakes. His group has developed a means of simulating the wakes generated by typical urban structures and implementing them within a flight simulation program. However, this is done without the need to simulate an entire city thus saving computational effort while increasing the applicability to suit a desired environment.
As the aircraft enters the wake, the simulation re-calculates the aircraft position and orientation to reflect the effect of the turbulence generated by the building.
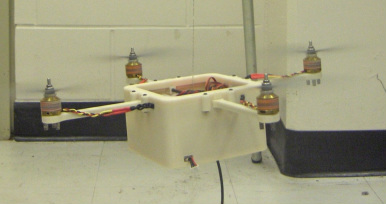
To test the results of these simulations, the research group has designed and built a quad-rotor aircraft to gather flight test data for validation purposes. This aircraft is also being used to test the suitability of fuzzy logic controllers within an autopilot for use under these turbulent conditions.