Quadcopters typically rely on GPS for localization. However, numerous applications exist where operation is desired, or even required, in GPS denied environments. This can include operation in locations where local geographical features make GPS unreliable (for example, remote mountainous terrain). This may also include indoor applications where reception is blocked, or even precision landing applications (i.e., package delivery) where GPS accuracy alone is insufficient.
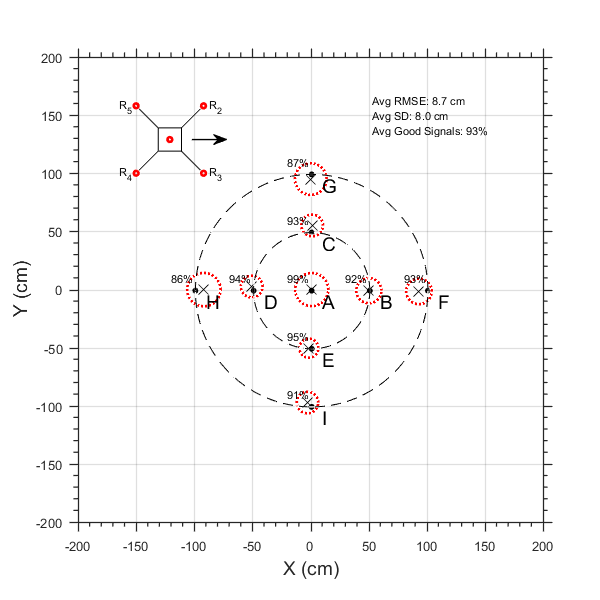
Therefore, we have developed and tested an ultrasonic localization system which uses five receiving nodes located on the vehicle and a portable beacon which can be tracked. This system is able to localise position under static conditions to within 9 cm with an update rate of approxmately 10 Hz.
{kind=link}

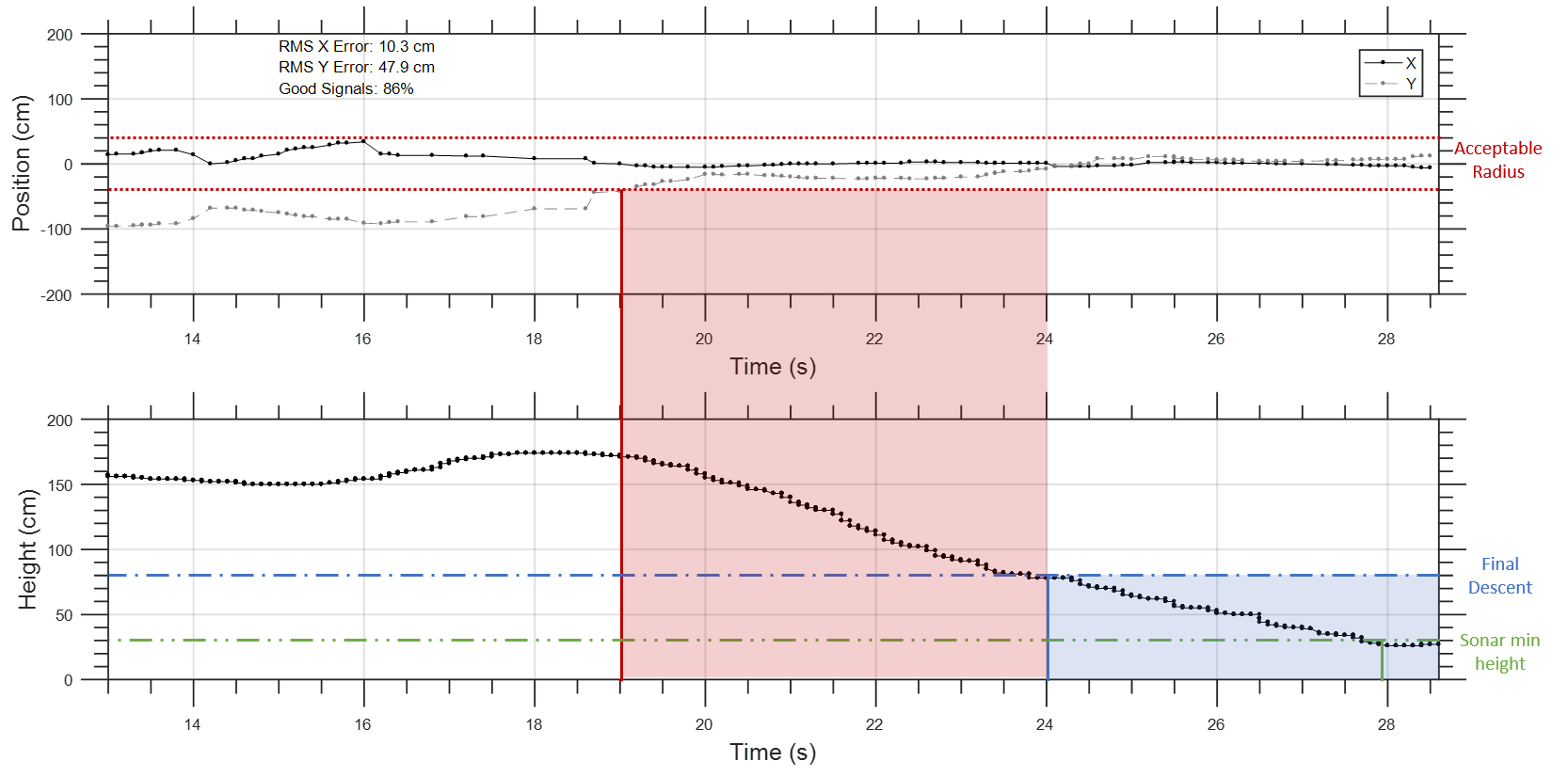
This translates to the quadcopter being able to hold itself in position to within 40 cm of the portable beacon at heights up to 3 m. This system is also capable of landing the quadcopter to within 18 cm of the beacon and following a moving beacon at speeds up to 1 m/s.
{kind=link}
