Each year the team explores entering several competitions worldwide. Our rovers meet the specifications for
- The University Rover Challenge, hosted at the Mars Desert Research Station in Utah
- The Canadian International Rover Challenge, hosted in Drumheller, Alberta
- The European Rover Challenge, hosted in Podkarpackie, Poland
- The United Kingdom University Rover Challenge, hosted in Machester, UK
- The Indian Rover Challenge, hosted in Vellore, India
Below are the competitions we’ve travelled to in the past.
2018 University Rover Challenge
For the first time, the team attended the URC after qualifying as one of 36 teams from an original field of 95 teams. In a great learning experience, the team finished in 24th place!




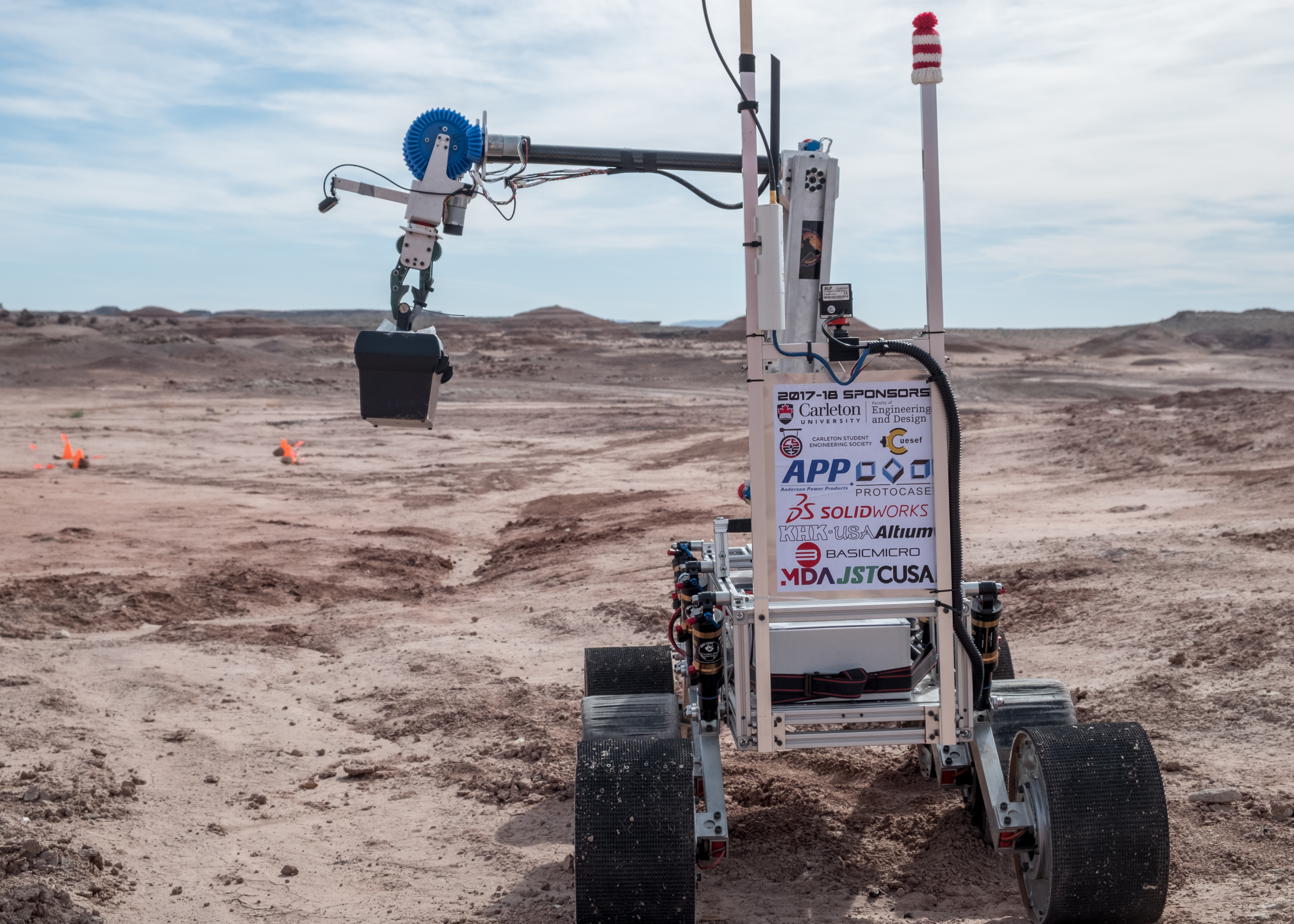



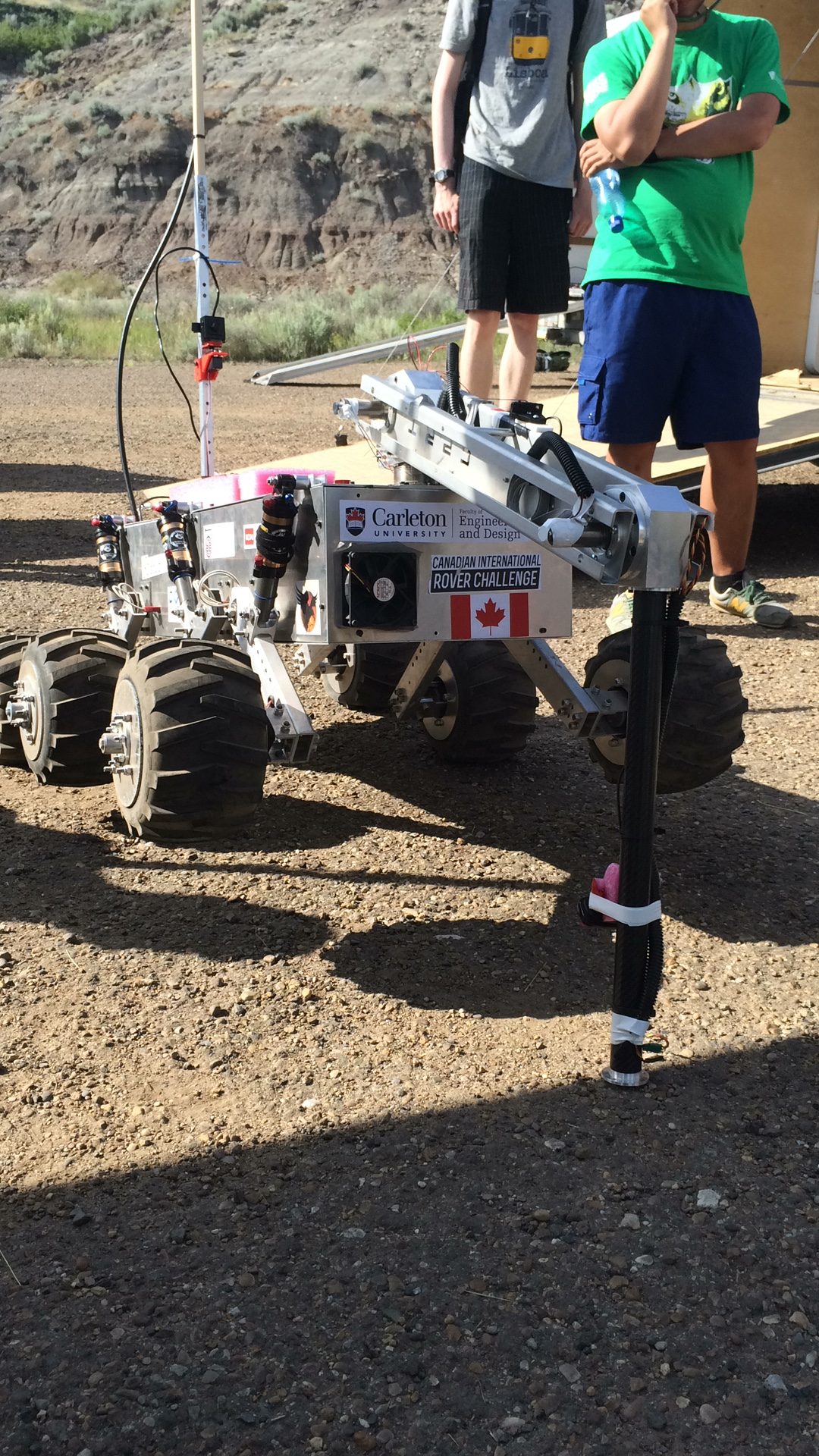
2017 Canadian International Rover Challenge
After 8 months of building, testing and designing, the team earned a 2nd place finish at the 2017 CIRC, missing first place by a fraction of a percentage point.






The CIRC consisted of 4 challenges.
- Prospecting
- The team had to explore an area of the Badlands and search for interesting geological or mineral sites. The operations team selected several sites of interest, taking pictures, logging co-ordinates, and producing a detailed report on their findings. CPRT’s excellent technical analysis compared with above-average photography earned 1st place in this challenge.
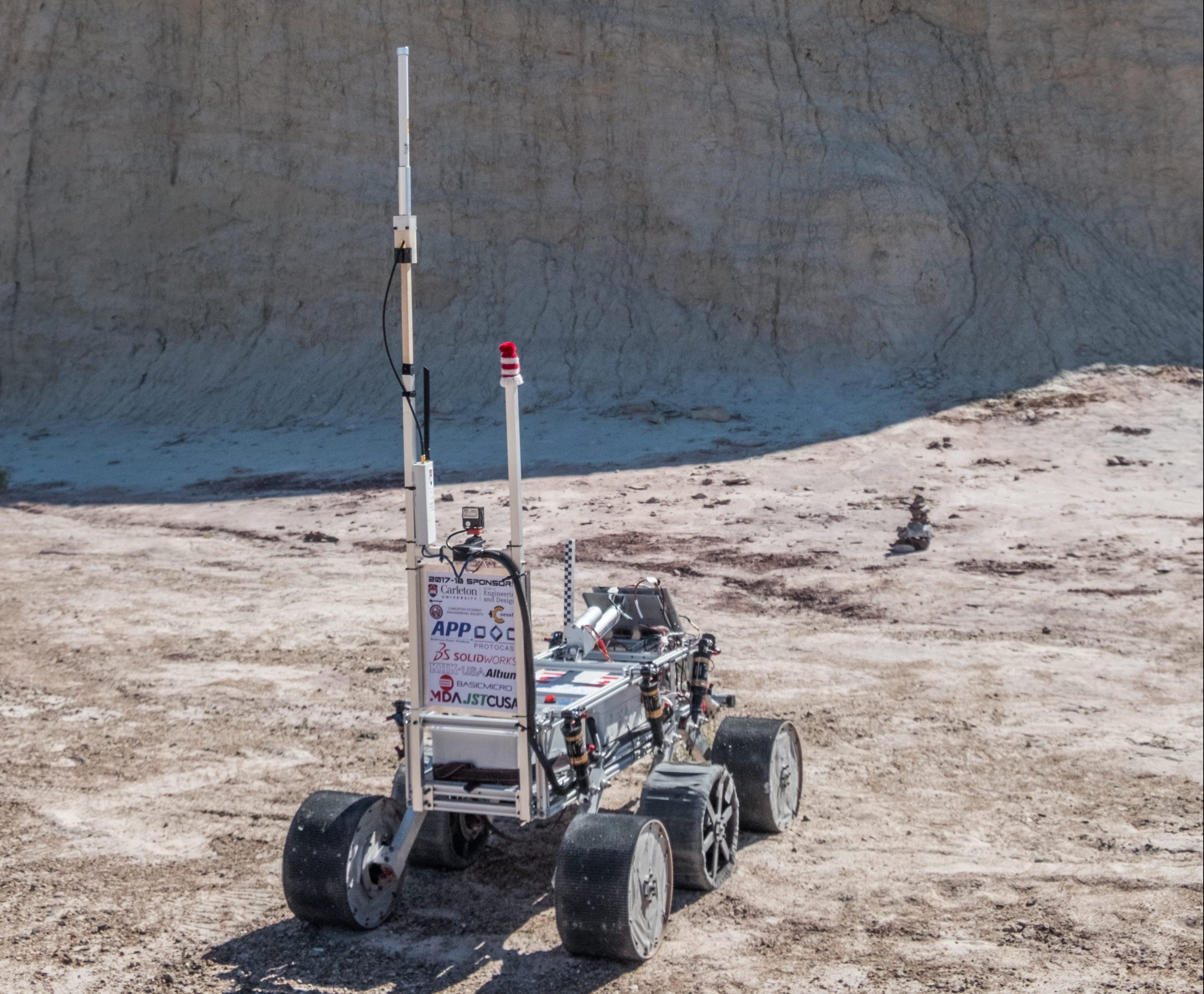
- Pathfinder
- A test of the rover’s agility and speed, the pathfinding test was all about navigating difficult terrain. The challenge consisted of 6 sections, 4 of which CPRT was able to navigate with operator control, and 3 of which the rover traversed autonomously. CPRT was the only team to demonstrate autonomous capabilities, earning the top spot in this challenge as well.
- Equipment Servicing
- This task challenged the rover’s ability to support astronauts in the field, with the command team using the rover to fuel, power and connect a generator to supply power to an astronaut. A fault in the arm’s safety mechanism limited its use, but the team was able to successfully move a wagon of fuel to the generator by carefully pushing the wagon.
- Retrieval
- Finally, the team was tasked with retrieving a series of tools from the field and return them to an astronaut. This task was quite challenging, involving difficult terrain and hard to see objects. Having solved the arm fault from the previous task, the operations team was able to bring CPRT to a 2nd place finish in this task.
2016 University Rover Challenge
The Carleton Planetary Robotics Team is pleased to announce our 4th place accomplishment at the 2016 UK University Rover Challenge.

The competition was broken down into three main tasks:
- Mobility Task/Astronaut Assistance
- The mobility task is designed to test the rover’s stability and performance when traversing over different obstacles while collecting multiple objects in the field and delivering them to an “astronaut” within a time limit.
- Science Survey
- Teams will be tasked with analyzing a sample site in the field, performing basic science experiments using onboard equipment, and collecting a soil sample for further analysis
- Presentation
- Each team will give a presentation to the UKURC judges describing their team, rover design and functionality. This task was completed prior to competition with the Critical Design Review Video which can be found here or on the homepage.
More information on the UKURC.