Waldo
Stay Tuned!
Sparky

Sparky is our second rover:
We began design in September 2016, and completed Sparky in June 2017. We entered Sparky in the 2017 Canadian International Rover Challenge, where the team won 2nd place.
The facts:
- Mass: 48kg in competition configuration, 56kg fully loaded
- Power: 12V 60Ah Lithium Iron Phosphate Batteries
- Communications: 802.11g, standard 2.4GHz Wi-Fi
- Status: Active
- Steepest slope climbed: 35 degrees, so far
- Top speed: 2.2 m/s

Sparky does pushups.
H3

2016 rover design. Terrain traversing configuration at the 2016 UKURC
H3 was our first rover. Starting in September 2015, we just finished H3 in time for the United Kingdom University Rover Challenge in July 2016. Despite persistent communications issues, the team earned a 4th place finish.
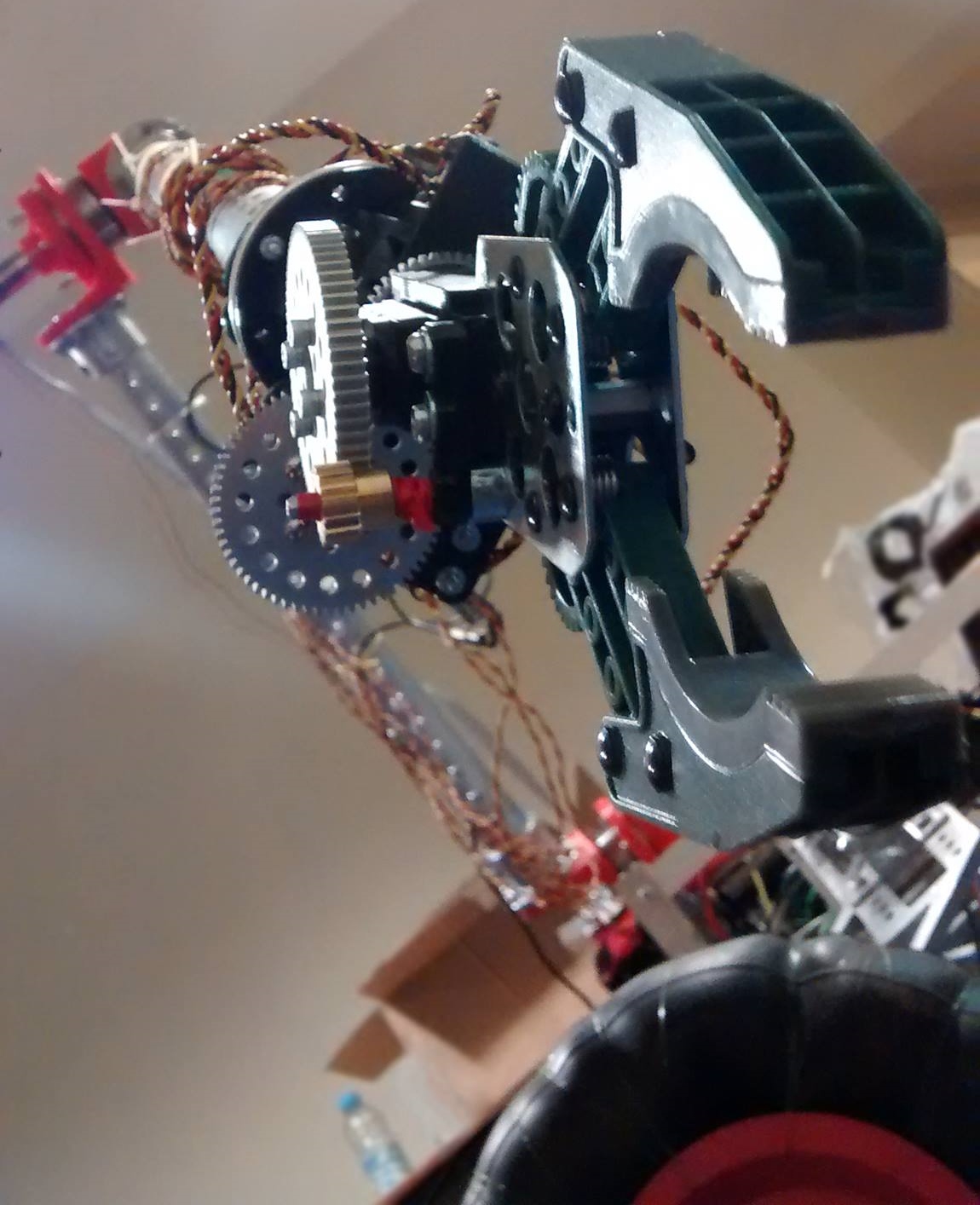
Claw end effector. Used for the astronaut assistance and equipment servicing tasks.
The facts:
- Mass: 37.2kg fully loaded
- Power: 12V 60Ah Lithium Iron Phosphate Batteries
- Communications: 802.11g, standard 2.4GHz Wi-Fi
- Top speed: 1.6 m/s
- Status: Retired
Pioneer P3-DX
We didn’t build this one, but it’s a member of the family anyways.
Way back in 2014, the software team needed a platform to program and test, to prepare their system for the rovers we would soon build. Thanks to a generous grant from CUESEF, the team was able to purchase a Pioneer P3-DX, which we continue to use for indoor testing and autonomy development.
The facts:
- Power: 3x 12V Sealed Lead Acid
- Communications: RS-232 Serial Only
- Status: Active