Robotic Snake – RoboConda
A group of undergraduate students developed a biologically-inspired robotic snake and a corresponding computer simulator. We also studied the effects that joint failures have on the resulting motion of the snake. The 1.75 m long robot is 4.3 kg and capable of carrying up to 5.5 kg of payload before. The robot’s turning radius is 0.6m, and the maximum forward speed is 750 mm/s. Some of their work can be found on their youtube channel.
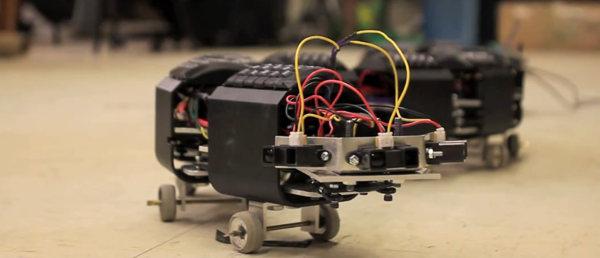
Experiments and corresponding simulations were carried out to study the robotic snake’s lateral undulation gait as power to individual joints was turned off. The results showed that joint failures were most detrimental to the snake’s lateral undulation gait when they occurred in the front half of the snake, while joint failures occurring between the midpoint and tail of the robotic snake were found to be less critical and generally resulted in slight lateral drifts as the forward motion progressed. To help compensate for joint failures in the tail-half part of the robot, a bias term was added to the control algorithm. For the conditions tested in this research, the use of a bias term appeared to be effective at reducing the lateral drift. The work resulted in a journal publication in Transactions of the Canadian Society for Mechanical Engineering.
Industrial Robotics and Manufacturing
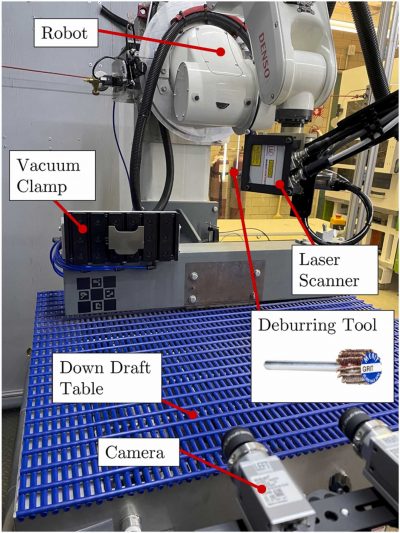
We were successful in securing a Joint NSERC CRD and OCE VIP-II application “Sensor-based precision robotics deburring for Aerospace manufacturing” with Arnprior Aerospace. The grant totals $750K over 4 years. The CRD portion will address some fundamental questions regarding the application of robotics to deburring aerospace parts. The OCE portion will fund adapting the technology to industrial robots to enable future production. The project has produced several publications and we are seeking IP protection on the technology. Currently, we are transition the system from a research platform to a more industrial system which could be implemented on the floor of a manufacturing plant. We are always interested to hear from motivated students interested in joining the lab and to work on the next phase of the project.
Grinding
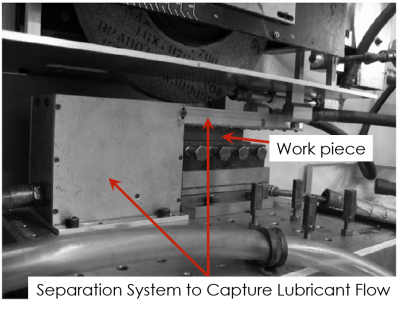
Dr. Irani’s graduate work involved developing and validating a new cutting fluid technique for creepfeed grinding. The new system incorporates high-speed fluid application, coherent jets, air scrapers and concentration effects associated with synthetic cutting fluids. Using a Blohm Planomat 408 grinding machine experiments show that the new coolant delivery system can achieve an 83% increase in material removal rate over a state-of-the-art coherent jet. As a result, the new system has the potential to increase production rates.
Learn about the other research for Flight and Marine robotics applications.