Signal Prediction
For marine applications the research group has successfully developed and deployed a real-time prediction algorithm and developed new set-point algorithms for various active-heave compensation systems. The prediction system acts as a previewing function on the set-point that allowed for improved control and operation since the system now estimates how/when a set-point is varying several time-steps, or seconds, into the future.
Below is a sample of the prediction system. The red line is trying to predict the blue line, with only knowing the history of the blue line. The computations are evaluated in real-time and allow for improved control of various system.
This prediction system is also being used to improve the flight and landing control systems of unmanned aerial vehicles. Much of the ongoing research uses and builds upon this prediction system, some of the questions which we are examining are:
- Can we use the prediction algorithms to optimize gain scheduling during motion compensation activities?
- Can we reduce power consumption and failure modes of marine motion compensation systems?
- Can we model, estimate and proactively mitigate collisions during small boat launch and recoveries?
- Can we combine all of the above for a complete crane/winch motion compensation system to mitigate and proactively reduce the occurrence or dangerous scenarios during operations?
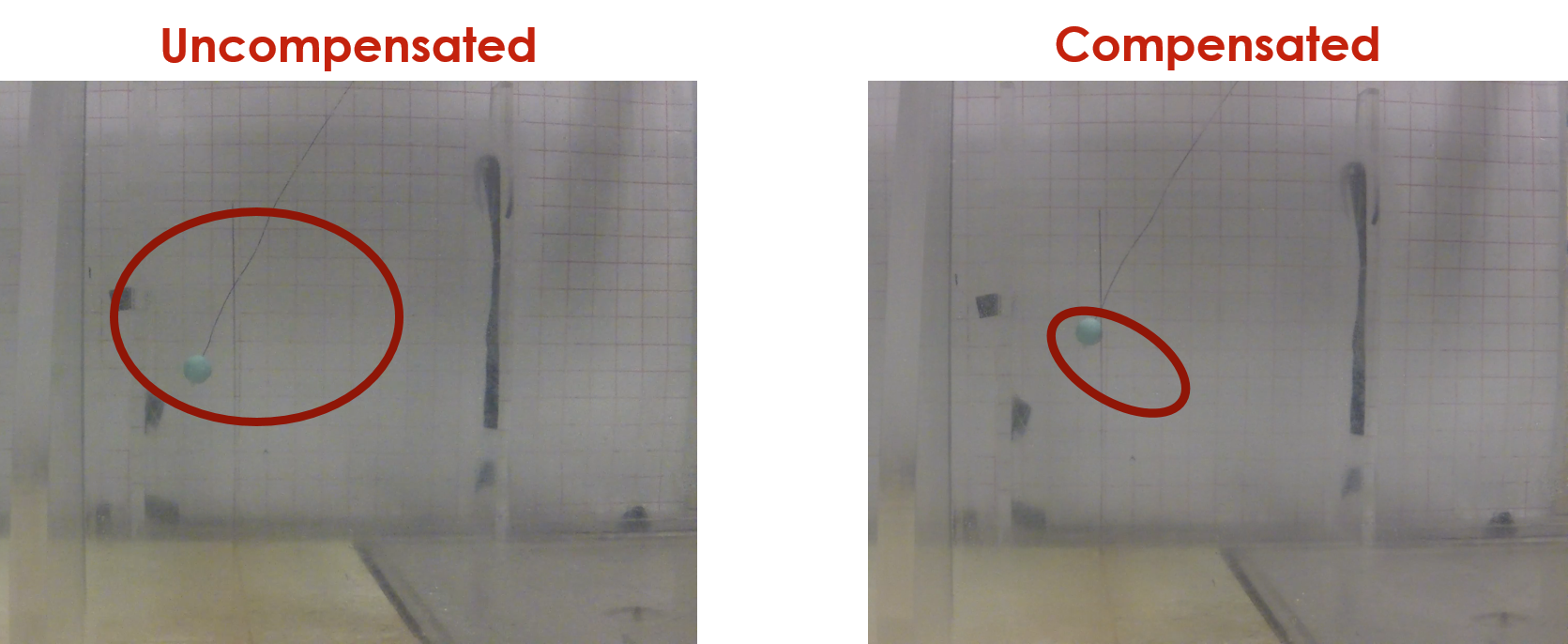
Towed Systems
We have been able to develop a new motion compensation system for tow bodies. The formulation was developed using Matlab and Simulink and then tested with a National Instruments controller and our flume-scale testbed to validate the models. The new system was able to reduce the motion by over 90%.
Several opportunities are available for skilled and motivated students interested in joining the lab to improve marine operations. The projects have a basis in fundamental research and theoretical development with experimental validation using industrial or laboratory hardware. Knowledge of MATLAB/Simulink and LabVIEW is required.
Learn about the other research for Flight and Terrestrial robotics applications.