 Unmanned Flight
Unmanned Flight
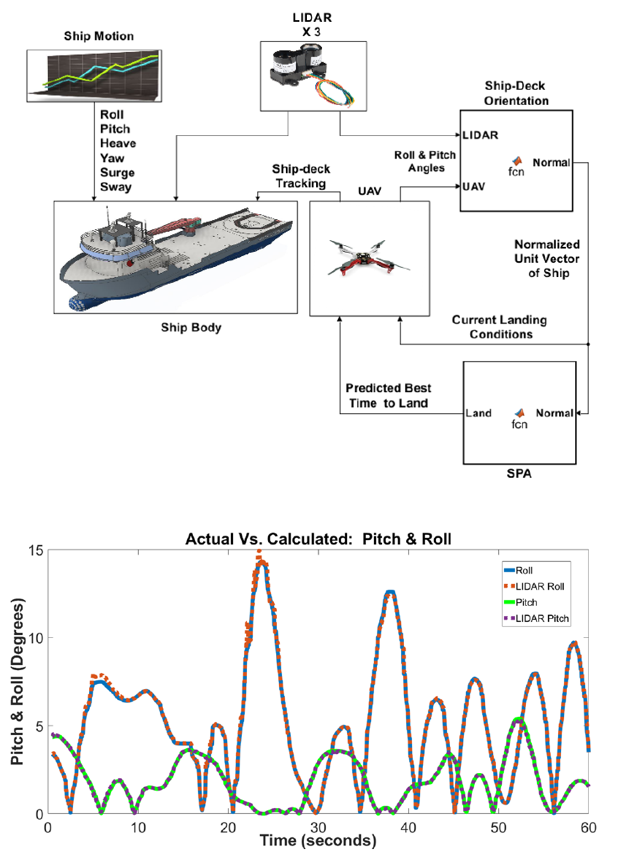
For any rotary aerial vehicle, ship-deck landings pose the some of the most challenging flight dynamic in an ever changing environment. Determining the safest time to land on a ship typically relies on the skill of the pilot to account for and to predict changes in the ships motion. On an autonomous vehicle determining a ‘quiescent period’, where the ship’s roll and pitch angles are below a critical threshold is significant problem.
We are examining the landing challenges by using the signal prediction algorithm to estimate quiescent periods enabling UAVs to land safely. This idea was explored using a model based approach in MATLAB’s modeling environment, Sim-Mechanics. Following the proof of concept modeling, the next phase of research will use a quad-rotor mounted with the hardware and hardware-in-the-loop testing. Building on past student work, opportunities exist to are available for skilled and motivated students interested in joining the lab to pursue research to improve various flight related challenges.
Flight Simulator – CUSP
As part of the undergraduate graduation requirements, all engineering students must take part in a year-long design project during their fourth year one of these projects is Carleton University Simulator Project (CUSP). CUSP began in 2002 with the goal of developing a novel simulator platform, free from the physical restrictions of traditional designs. The current design, the Atlas motion platform, is unique in that it may rotate freely in any direction. We are currently constructing the unique full-scale flight simulator which is capable of full inverted flight and unlimited rotation on all of the axis. The system is transitioning from an undergraduate teaching and learning tool to a high-fidelity instrument for graduate research at the masters and doctorial levels. Building on past student work, we are always looking for highly qualified students to improve the control and vision systems of the full-scale flight simulator. For further information about the project please visit the CUSP website or contact Dr. Irani.

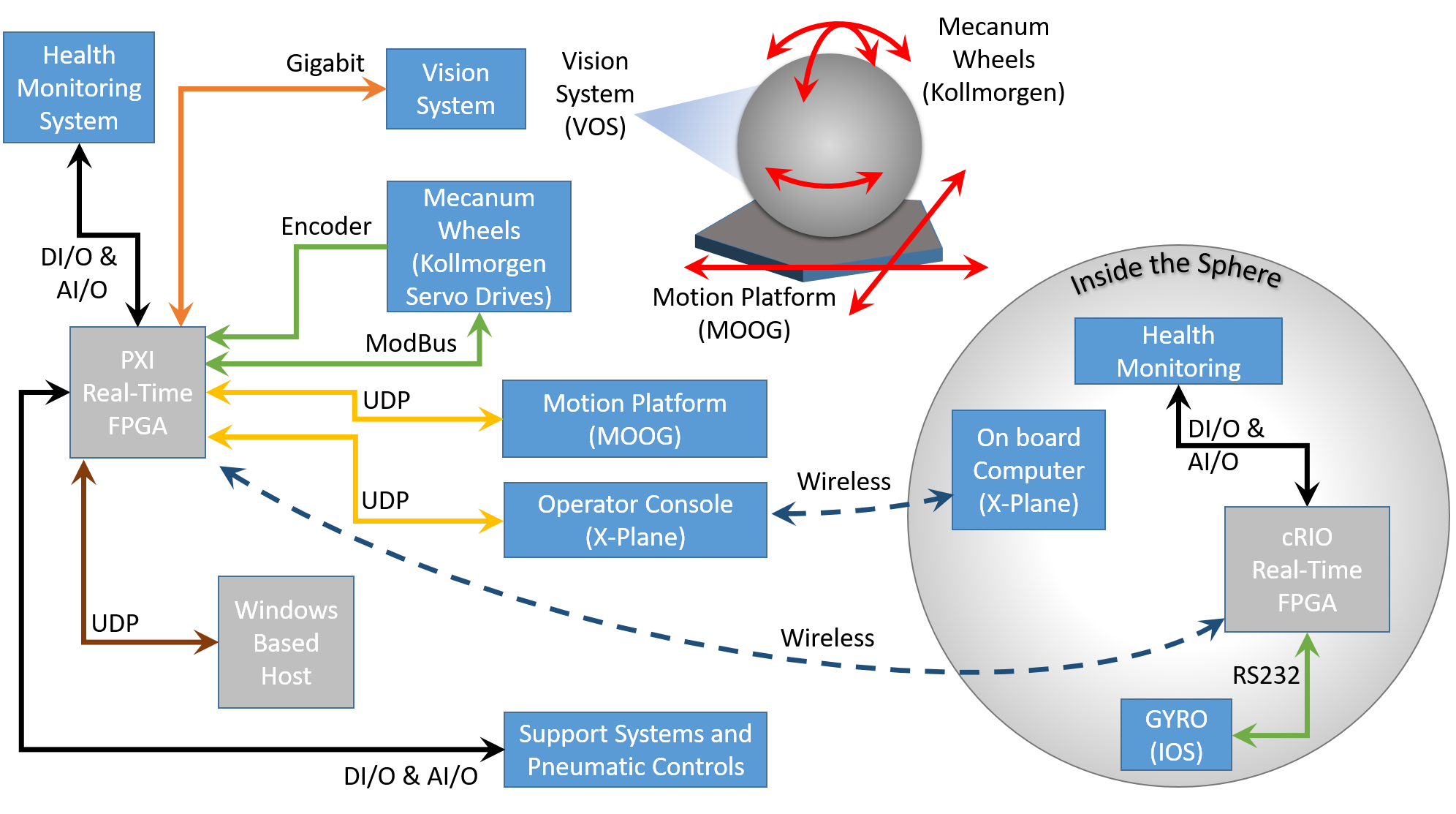
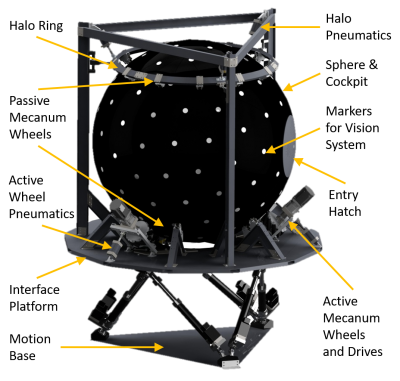
System Overview
A traditional Gough-Stewart platform provides three-dimensional translation motion. The rotation is provided by mecanum wheels acting on a spherical shell containing the simulated cockpit. This unique design allows the platform to recreate situations such as inversions or spins that are not feasible in a standard flight simulator. The original proof-of-concept model was the size of a basketball, the system was then scaled to a 1.4 metre sphere and in 2013 the construction of the full-scale, 3 metre system began.
Outcomes
Scientific: The ultimate outcome of the project is a unique kinematic architecture and a new paradigm for motion simulators. This long-term outcome will provide incremental advancements and studies in sensor fusion, digital filtering, spherical mapping, mechanism design and human factors.
Commercial: The operational full-scale simulator will provide a working prototype of the new motion simulator which will complement the existing portfolio of flight simulators. It is anticipated that once the full-scale prototype is operational, commercial partners will be sought after to help bring the technology to market.
Schematic of Atlas Simulator and the major components
Whale Achoo and Gesundheit
Learn more about Whale Achoo and Gesundheit here!

Learn about the other research for Marine and Terrestrial robotics applications.