Similar to any service or product, industrialization of On-Orbit Servicing (OOS) demands performance enhancement through introducing relevant autonomy elements in planning and executing single and multiple servicing missions. This research focuses on developing an overall mission architecture for performing multiple on-orbit servicing missions by a fleet of servicers in the form of free-flying single-arm space manipulators. The architecture targets to improve the two key industrialization criteria of resource and service through multiple levels of multi-objective optimizations:
- Minimizing lifetime mission fuel cost and identifying the most profitable regions for placing the parking orbits through performing a Monte Carlo simulation study.
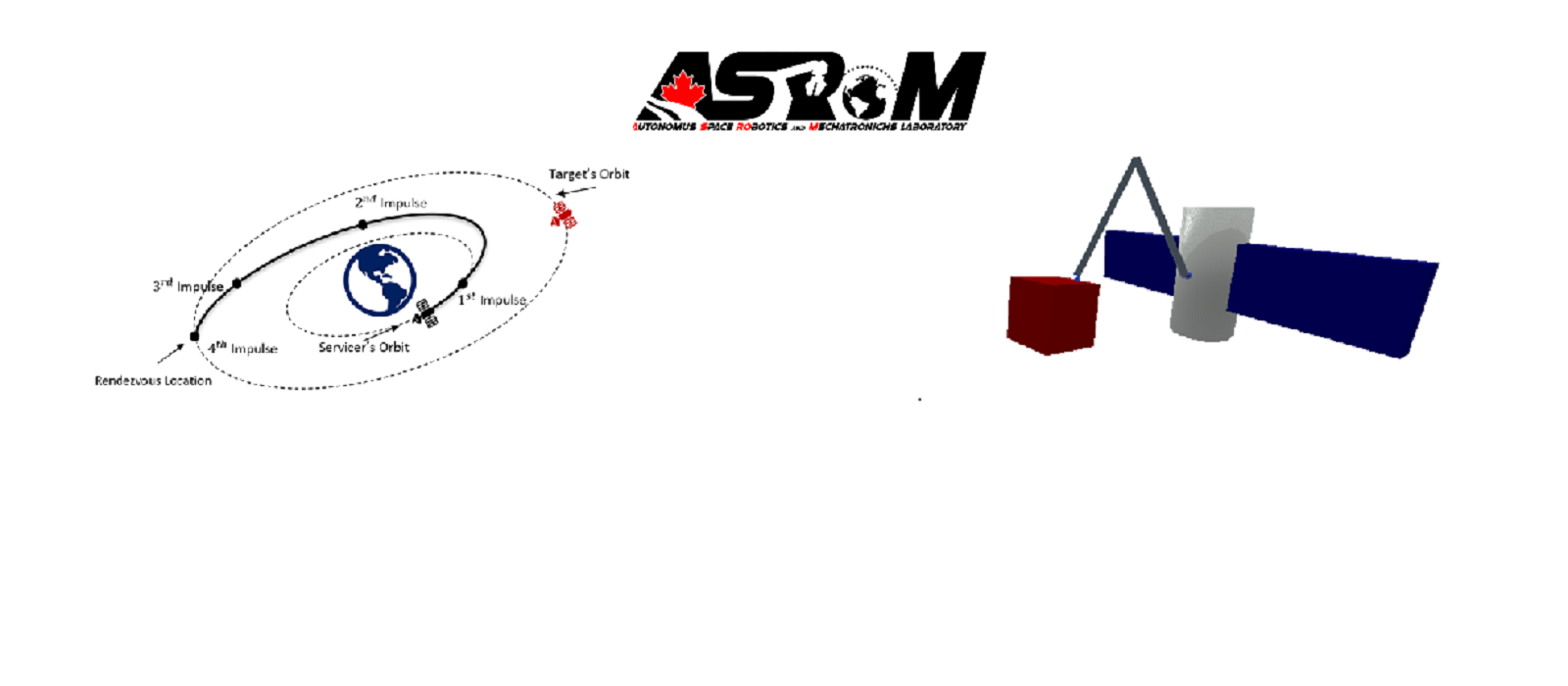
- Developing shape-based Pareto optimal transfer trajectories for the long-range rendezvous with orbiting targets, in a single OOS mission, as part of resource management.
- Developing nonlinear model predictive control strategies for trajectory tracking and following in the long-range rendezvous phase.
- Developing priority-based Pareto optimal service scheduling in OOS missions with multiple servicers and multiple targets.
In almost 90% of servicers’ lifetime, they are in an idle state in the parking orbit awaiting dispatch or in transfer orbits. To enhance the quality of the provided service, the proposed architecture suggests effective use of this time to task servicers with performing machine learning that helps improve the functionality of their GN&C systems in upcoming missions. The task involves trajectory learning for a servicer’s manipulator system, using deep reinforcement learning and transfer learning. This research aims to develop online trajectory generators for space manipulators, using the Deep Deterministic Gradient Policy (DDPG) and transfer learning.
A video of our preliminary study for online
workspace obstacle-free trajectory generation