Facilities
Spacecraft Proximity Operations Testbed (SPOT)
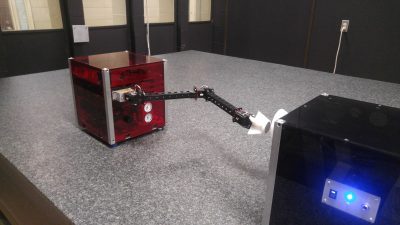
This testbed is used by researchers to investigate robotics, control, path planning, and computer vision technologies enabling spacecraft proximity operation tasks, such as inspection maneuvers, rendezvous and docking, robotic capture of a tumbling target, and on-orbit assembly of large structure. SPOT consists of three air-bearing spacecraft platforms (RED, BLUE, and BLACK) operating in close proximity on a 3.5 m x 2.4 m granite surface. The use of air bearing on the platforms reduces the friction to a negligible level. All platforms are actuated by compressed air expelled through miniature air nozzles, to provide three degree-of-freedom (3DOF) control authority. The motion of both platforms is measured in real-time through LEDs which are tracked by a ten-camera motion capture system. This provides highly accurate ground truth position and attitude data to evaluate the performance of the new robotics, control and computer vision technologies. Computer vision sensors installed on RED include a stereo camera, a thermal infrared camera, a laser ranger finder, and a LiDAR.
GPS-Based Formation Flying Testbed
The centerpiece of this real-time hardware-in-the-loop (HIL) testbed is a GPS simulator that executes a real-time high fidelity simulation of the entire GPS satellite constellation, to compute, based on the actual spacecraft attitude and orbit, the GPS signals that would be received by a GPS receiver installed on that spacecraft. The radio frequency (RF) signal generator inside the GPS simulator then generates this signal and sends it to an actual GPS receiver connected to its RF output. The GPS receiver is connected to a target computer which runs the GN&C software and propagates the attitude and orbital dynamics, which are then used to steer the GPS simulator. Up to two GPS receivers can be connected to the GPS simulator, enabling the HIL validation of formation flying GN&C algorithms and related software.