By Adam Landry
Photos by Ainslie Coghill
In July of 1969, a five-year-old Alex Ellery watched in awe alongside the rest of the world as he witnessed humanity take its first steps on the Moon.
Today, the longtime professor in Carleton’s Department of Mechanical and Aerospace Engineering and former Canada Research Chair in Space Robotics and Space Technology is looking to supply humanity with a number of tools that may help us take our next giant leap into the final frontier.
As part of a three-year joint-initiative with McGill University, Ellery has begun developing a specialized drill and instrumentation system that will allow planetary rovers to extract core samples from Mars’ polar ice caps and ultimately test for evidence of life.
“I’m currently working to roboticize and robustify several drill instruments that will be able to discern the presence of DNA and amino acids within a sample,” he explains. “Finding either of these beyond Earth would be a defining moment in planetary exploration, as they have proven to be the essential building blocks for all life as we know it.”
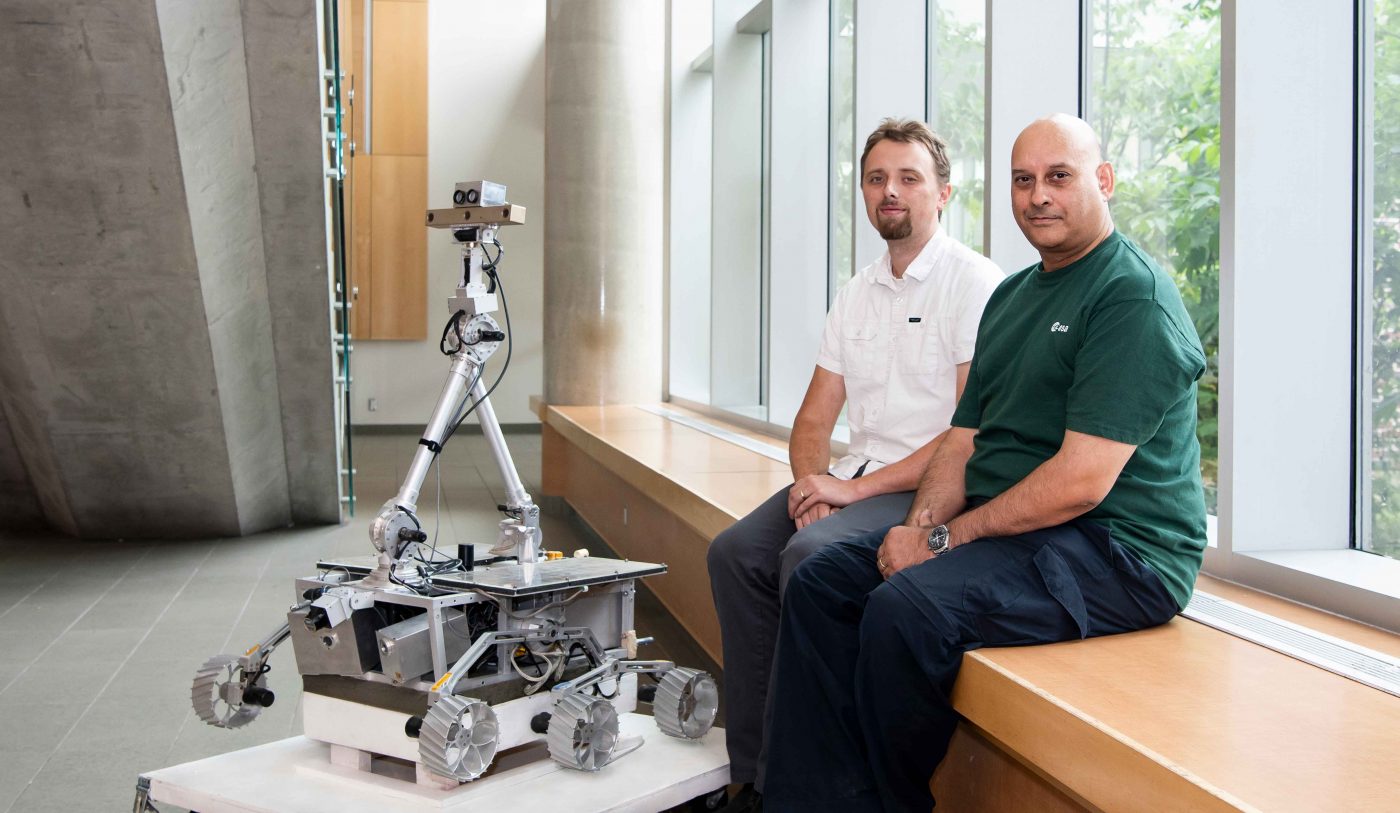
Professor Alex Ellery (right), pictured alongside PhD student Alexander Tettenborn, also served as the technical lead behind Carleton’s Kapvik micro-rover, a fully functional prototype developed for the Canadian Space Agency.
With additional support from the Canadian Space Agency (CSA) and satellite partners in the United States and United Kingdom, Ellery hopes to adapt, enhance and combine the latest in DNA sequencing technology into a unified system that can be used to detect life on other worlds, beginning with the Red Planet.
While existing technologies are being used as a basis for the drill’s instrumentation kit, Ellery notes that optimizing and integrating everything into a single package presents numerous challenges.
“Here on Earth, we’re able to use a variety of specialized devices to extract and examine core samples,” he says. “On Mars we won’t have that luxury. Everything must instead be consolidated into a single apparatus that can be outfitted onto a rover or lander.”
Extreme cold will also be a factor on Mars, as its polar regions are believed to experience temperatures as low as –150 °C (–238 °F). As a result, Ellery’s technology recently underwent extensive testing at McGill’s Arctic research station in Nunavut in order to optimize its performance under similarly harsh conditions.

Aerospace Engineering PhD student Alexander Tettenborn assisted Ellery in developing an early prototype of his core-sampling drill, which underwent preliminary testing in Canada’s Arctic during the summer of 2018.
Despite knowing that eventually he too will have to brave the cold in order to take part in field tests, Ellery understands it will be a small price to pay if his device one day helps to find the answer to one of humanity’s oldest questions.
“Discovering extraterrestrial life at any level would confirm that we are not unique and that we are not alone,” he says.
“If living organisms could be detected simply by exploring our own backyard, chances are the universe must be teeming with it.”
While Ellery’s initial goal is to adapt the drill’s instrumentation package for deployment on a Mars rover, he also intends to refine the technology even further to aid the search for life on more distant worlds, beginning with Europa, the smallest of Jupiter’s four Galilean moons, and Enceladus, the sixth-largest moon of Saturn.
“At present, Europa and Enceladus are considered the top prospects to harbour extraterrestrial life within our solar system,” he notes. “While they are much too far from our sun for life to exist on the surface, both are believed to contain global oceans beneath their frozen exteriors as a result of a gravitational phenomenon known as tidal flexing, which generates heat within their cores.”
Having recently been awarded a unique research opportunity with Magellan Aerospace in conjunction with the CSA, Ellery has now begun to assess the viability of miniaturizing his instrument package for a device known as a micro-penetrator, which could be used to infiltrate the hidden waters on both moons.
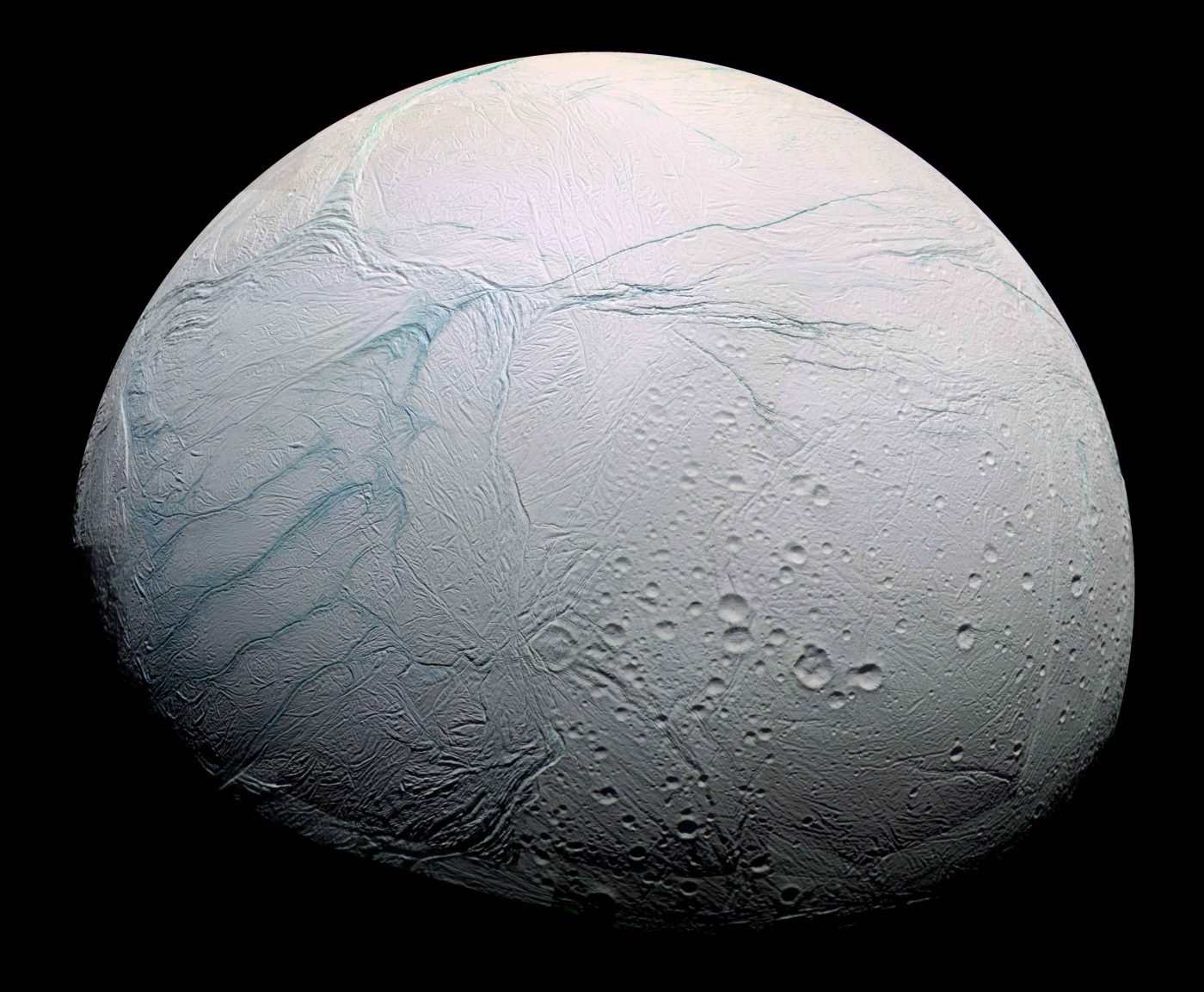
Saturn’s sixth-largest moon, Enceladus, has shown evidence of hosting a global ocean beneath its icy surface, making it a top prospect in the search for life beyond Earth. (Image Credit: NASA/JPL/ESA/SSI)
“Essentially, we’re looking to integrate the technology into a projectile which would be able to puncture the crust of each moon at its thinnest point,” he explains. “By targeting either surface cracks on Europa or one of the many fissures on Enceladus, we believe it’s possible to navigate our way through the ice and rock in order to assess whether life exists in the oceans below.”
While micro-penetrator technology could prove to be a game changer in how we search for life on distant worlds, Ellery understands that rovers remain far more versatile in that they can be outfitted with a broader array of research instruments and have the ability to journey across alien landscapes.
With that in mind, he’s also working with the Natural Sciences and Engineering Research Council (NSERC) to equip future rovers with a form of artificial intelligence that would enable them to make certain science-based decisions autonomously.
“By providing rovers with the tools to determine what’s worth investigating, they can spend more time actively exploring Mars’ terrain instead of waiting for humans to plan their next move,” says Ellery.
While today’s rovers already function autonomously in some respects, largely by means of preinstalled commands, independent activities are currently limited to recurring tasks such as self-diagnostics and day-to-day operations. Ellery instead plans to put rovers in the metaphorical driver’s seat by integrating their onboard systems with advanced image processing capabilities.
“In utilizing the latest image processing techniques, rovers will be able to identify different types of rock, such as those which are sedimentary and could possibly contain fossils or other evidence of past life,” he notes. “They will also be able to detect anomalies in the Martian landscape that may merit further investigation.”
While machine learning powers the bulk of artificial intelligence systems here on Earth, Ellery warns that equipping rovers and other space robotics with these types of algorithms could pose significant problems, since they are based largely upon trial and error.
“As soon as you give a machine the ability to learn, you lose control of it,” he explains. “If a rover decides to explore something interesting and, for instance, tumbles down a cliff, well it’s certainly learned not to do that again, but unfortunately there’s no way for us to reset or repair it and a significant investment would be lost.”
Instead, the rover’s decision-making capabilities will be based upon a series of filters which classify visual data in order to narrow down priority targets, such as particular rock patterns or formations. That same system will also allow a rover to change its mind while approaching a research target if, upon closer inspection, it believes it to be unremarkable.
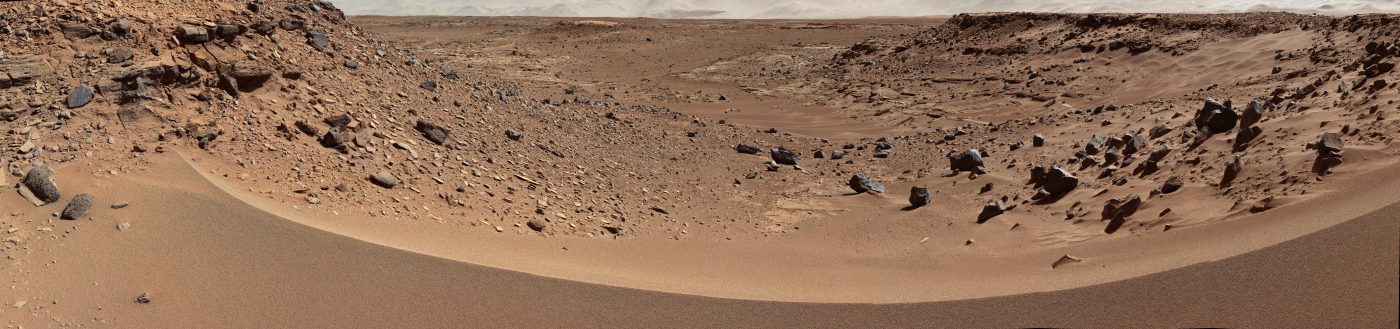
View of a Martian valley compiled from images taken by NASA’s Curiosity rover in 2014. (Image Credit: NASA/JPL-Caltech/MSSS)
While humans will still be keeping tabs on the rover’s activities and be able to take control if needed, one of Ellery’s goals is to reduce the volume of operational data currently being sent back and forth, given that communicating over such great distances has proven to be a complex affair.
Since the distance between Earth and Mars can fluctuate by a staggering 346 million km depending on where the two planets are in their respective orbital cycles, signals being transmitted between them require roughly 4 to 24 minutes to travel each way. Adding to that delay, since each planet is constantly changing position as it circles the sun, mission control must also wait for a line of sight to be established between Earth and the rover (or orbiting spacecraft) in order to send or receive data.
Toss in additional factors such as the time of day, power limitations onboard the rover and the reality that everything being sent back to Earth must be analyzed, and it’s not difficult to see why a typical command cycle can take up to 4 days to complete.
With such a lengthy turnaround, Ellery hopes that future communications will revolve primarily around potential discoveries.
“By only transmitting data that is likely to be scientifically valuable, we can ensure that our resources are being utilized as efficiently as possible,” he says.
As humanity looks to increase its mark upon our solar system and beyond, Ellery has also begun work on an ambitious project to develop self-replicating machines that could help to provide a shortcut in establishing infrastructure on other worlds.
While 3D printers may initially come to mind, Ellery’s devices would instead be more like high tech factories, which would be capable of extracting and processing native materials from the Moon or Mars in order to manufacture and assemble individual components.
“Self-replicating machines offer the prospect of sustainable space exploration,” he explains. “They will likely be the key to developing off-world colonies, which would eventually enable humanity to extend its reach past our solar system.”
Powered by solar energy, Ellery believes a single self-replicating machine would be able to produce over 2 million copies of itself in only 13 generations. Once a baseline quantity has been established, units would then begin constructing a variety of essential technologies such as solar panels or mining equipment that would otherwise have to be transported from Earth.
While certain technologies may prove too complex for a single unit to manufacture, Ellery notes that these machines could also be used to construct enhanced facilities that would be capable of building virtually anything from rovers to spacecraft.
“Once a self-replicating machine is delivered to its destination, the entire operation becomes fully self-sustaining,” he says. “All you would need is that initial investment.”
Although significant startup costs could be seen as a barrier, Ellery emphasizes the potential of self-replicating technology to provide lucrative returns over the long term by means of developing infrastructure that could harvest solar energy or mine valuable mineral resources.
He also explains that establishing a foothold beyond Earth would provide humanity with a cost-effective base of operations to explore our solar system.
“Here on Earth, fuel costs alone can run millions of dollars per launch,” he says. “Since the Moon only experiences 16.5 per cent of Earth’s gravity and has virtually no atmospheric
drag, lunar launches could be facilitated there for a fraction of that price tag.”
While the technology required to achieve his vision will likely require decades to fully develop, Ellery is confident that the prospect of transforming planetary exploration into a revenue-based enterprise will keep the project moving forward.
“This technology has the potential to revolutionize our entire funding model for space exploration,” he says. “By investing the profits generated by these missions into other initiatives, we would be able to sustain and expand our spacefaring efforts indefinitely.”
Thursday, September 13, 2018 in Aerospace, Faculty, Feature Stories, Industry Collaboration, Research, Robotics
Share: Twitter, Facebook