Faculty Spotlight
Emergency deployment of direct air capture as a response to the climate crisis
There is a growing consensus among scientists as well as national and local governments representing hundreds of millions of people, that humanity faces a climate crisis that demands a crisis response. New research from the University of California San Diego explores one possible mode of response: a massively funded program to deploy direct air capture (DAC) systems that remove CO2 directly from the ambient air and sequester it safely underground.
MAE’s Assistant Professor Ahmed Abdullah is a co-author of the paper “Emergency deployment of direct air capture as a response to the climate crisis” which reveals such a program could reverse the rise in global temperature well before 2100, but only with immediate and sustained investments from governments and firms to scale up the new technology.
The image displayed is a rendering showing ‘first look’ of what will be the world’s largest DAC plant. – Courtesy of Carbon Engineering.

Carleton University’s Jeremy Laliberté Develops COVID-19 Protocols for Delivery Drone Decontamination
Drones can deliver cargo to places that other vehicles can’t reach – whether that’s a remote worksite on a rugged mountainside, or a hurricane-hit community that’s lost road access. But these types of locations are also far removed from medical facilities, and a COVID-19 outbreak a remote location could prove especially difficult to manage.
“Aerospace materials and structures are sensitive to degradation, and decontamination can potentially reduce the airworthiness of an aircraft,” says Laliberté.

Synthesis and characterization of partially silane-terminated polyurethanes reinforced with acid-treated halloysite nanotubes for transparent armour systems
Graduate student, Rafaela Aguiar, has recently published a paper with Nature Research and Scientific Reports!
In the present work, nanocomposites based on the partially silane-terminated polyurethanes reinforced with sulfuric acid-treated halloysite nanotubes were synthesized and evaluated as a potential candidate for transparent blast resistant configurations. The polyurethane must present high tensile ductility at high strain rates to be able to contain fragments and increase the survivability of the system. Gas-gun spall experiments were conducted to measure the dynamic tensile strength (spall strength) and fracture toughness of the nanocomposite and neat polyurethane.
The nanocomposite presented a 35% higher spall strength and 21% higher fracture toughness compared to the neat polyurethane while maintaining transparency. The recovered samples following the spall tests were analysed via scanning electron microscope fractographies. The nanocomposite and neat polyurethane samples were chemically characterized via Fourier transform infrared spectroscopy and melting behaviour via differential scanning calorimetry. The improved properties can be attributed, in large part, to the presence of more rigid spherulitic structures, and a rougher fracture surface constituting.
Read the full article HERE.
Assessment of Masks and Aerosol Characterization from Cough, Sneeze, Speech, and Breath
COVID-19 can be spread by sneezing, coughing, and possibly even through normal conversation. The proposed research comprises numerical, in vitro, and in vivo fundamental studies of the characterization (size and velocity) of droplets and aerosols during sneezing, coughing, talking, and breathing as functions of time and distance from the source.
An adjustable cough and sneeze aerosol generator will be created and used to test filtration levels of popular designs of homemade masks. During the in vivo portion of the work (planned for when the present pandemic has subsided and social distancing regulations have eased), plume visualization using high-speed shadowgraph imaging techniques will be performed to complement the simultaneous measurement of aerosol size and velocity using phase Doppler anemometry at determined distances from the airborne material source. Numerical simulations of aerosol dispersion, validated against the experimental data, will provide a complete spatial characterization of the plumes.
Recipient of the Carleton University COVID-19 Rapid Response Research Grants competition

Airwothiness Effects of Decontamination Processes on Drone Aircraft
In this project, we will examine industry-accepted decontamination methods and chemicals used in the traditional manned aviation industry and assess their applicability, operational impact, and potential to degrade the airworthiness of large and small remotely piloted aircraft systems (RPAS or “drones”). The short-term goal is to identify and develop an acceptable decontamination process for these aircraft for immediate deployment while identifying long-term design modifications and improvements to simplify decontamination of future drone aircraft of all types.
Recipient of the Carleton University COVID-19 Rapid Response Research Grants competition

Semi – Autonomous Mobile Robotic Systems for Remote Assessments of COVID-19 Patients
This collaborative research project between Carleton University’s Advanced Mechatronics Laboratory (ABL) and the Children’s Hospital of Eastern Ontario (CHEO) proposes robotic remote patient assessment to enable physical distancing, thus preventing disease outbreaks. The ABL’s expertise in medical robotics will be complemented by CHEO’s medical expertise in developing and testing this technology.
Carleton’s existing robotic platform will be enhanced by additional medical instrumentation, advanced sensing and control tools, teleconferencing capability, and the required hardware and software infrastructure. Moreover, small-size UV-based disinfection apparatus will be considered for integration. This short-term project focuses on developing a proof-of-concept platform and conducting preliminary experiments at CHEO’s simulation environment. This will allow medical researchers with various expertise to conduct early research in preparation for more systematic clinical trials to be funded by further joint research applications.
Recipient of the Carleton University COVID-19 Rapid Response Research Grants competition

An Experimental Investigation of the use of an Outlet Silencer to Quiet Ejectors
A recent paper by Mechanical and Aerospace Professor Joana Rocha and graduate student, Gerard Desmarais, was published in the International Journal of Aeroacoustics via SAGE publishing.
Their experimental work investigates the use of a silencer affixed to the outlet of a subsonic air–air ejector as a means of quieting the ejector. An emphasis is placed on finding a silencer design which has a minimal impact on the mass flow rate exhausting from the ejector (pumping performance).
It is found that the size and shape of the ejector can be designed in such a way to reduce the overlap of natural modes and thus the overall noise levels of the ejector caused by high levels of resonance.
Professor Jie (Peter) Liu is leading international research efforts in Prognostics and Health Management (PHM)
Dr. Jie (Peter) Liu is an Associate Professor in the Department of Mechanical and Aerospace Engineering at Carleton University. He is leading international research efforts in Prognostics and Health Management (PHM) with applications to several engineering systems including gas turbine engines, lithium ion batteries, and mechanical power transmissions. A recipient of Carleton University’s Achievement Award (2017) his research contributions have led to 56 journal papers and 36 conference papers.
As an emerging interdisciplinary engineering program, Prognostics and Health Management (PHM) has been expanding very rapidly in the past twenty years with tens of thousands of researchers and practitioners worldwide.
Nowadays, the applications for PHM are very broad, encompassing aerospace, energy, manufacturing, defence, civil, automotive, transportation, communication, and health care. PHM methodologies could provide effective means for reduction in cost associated with the maintenance of complex systems, equipment, or facilities through accurate assessment of incipient damages and/or reliable prediction of remaining useful life at both component and system levels.

The Energy and Emissions Research Lab (EERL) study finds Federal regulations for methane more effective than Alberta’s, but both can improve!
New research published by Carleton University’s Matthew Johnson and David Tyner in Elementa: Science of the Anthropocene suggest that the federal government’s proposed regulations to reduce methane emissions, a potent greenhouse gas emitted by the oil and gas industry, would be more effective than competing regulations proposed by the Alberta government.
But there’s room for improvement for both, and a question mark over whether either set of regulations would meet Canada’s methane reduction targets.

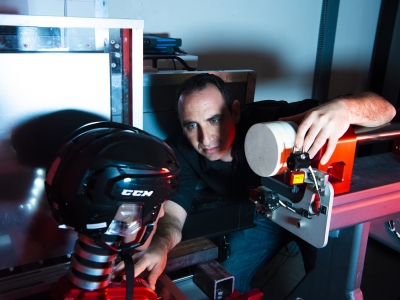
The Cadaveric Response to Concussive Impact: Tracking brain tissue displacement and strain fields with high-speed X-ray imaging
Professor Oren Petel has received a Carleton University Research Achievement Award, which recognizes outstanding research achievements and excellence.
A state-of-the-art X-ray system, jointly funded by the Canadian Foundation for Innovation and the Ontario Research Fund, is currently being used to advance injury biomechanics knowledge. Prof. Oren Petel and his Impact Dynamics Research Group (carleton.ca/impact) have focused on developing new tools and techniques to complement existing helmet evaluation methodologies. “Our ultimate goal is to use a new paradigm to guide future helmet design” says Prof. Petel.
Prof. Petel’s custom and unique high-speed X-ray imaging system, designed and built in his lab with his research team, has enabled multidisciplinary research measuring the relative motion between the brain and skull of cadavers, data required to calibrate brain injury models. His research group currently works with commercial helmet designers to translate their innovations outside of the university, in an effort to reduce concussion incidence, and ultimately benefit public health.